

三维平衡-仪由两部分组成
一、陀螺仪传感器+嵌入式系统(运动控制单元)
陀螺仪原理:
系统组成:
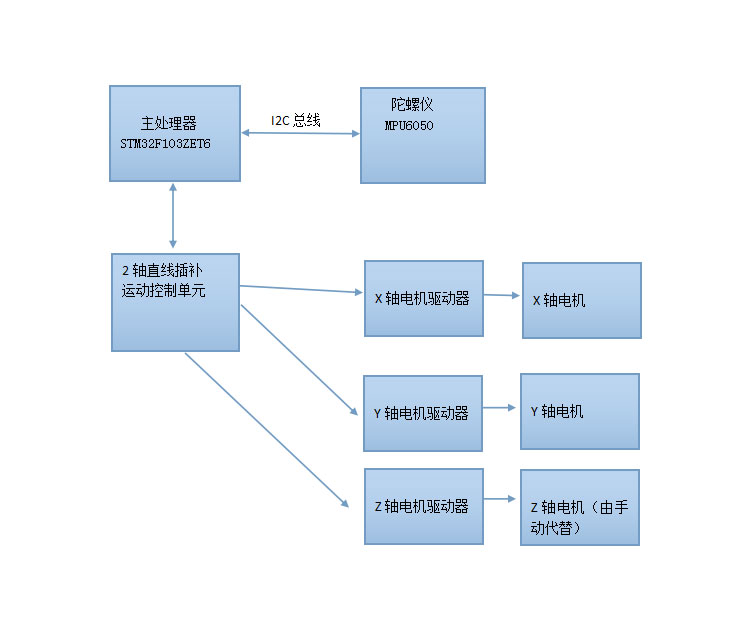
I2C总线
1. MPU6050是一款6轴陀螺仪,为全球首例整合性6轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP,可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI接口仅在MPU-6000可用)。MPU-60X0也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。 MPU-60X0对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。 一个片上1024字节的FIFO,有助于降低系统功耗。 和所有设备寄存器之间的通信采用400kHz的I2C接口或1MHz的SPI接口(SPI仅MPU-6000可用)。对于需要高速传输的应用,对寄存器的读取和中断可用20MHz的SPI。另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。
相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。
2.主处理器是一款性能强大的32位微控制器。
高72MHz工作频率,在存储器的0等待周期访问时可达1.25DMips/MHZ,
片内Flash为512k字节,片内RAM为64K字节。
3、主处理器每隔10ms读取MPU6050陀螺仪的三轴的加速度,配合姿态解算器,运用动态卡尔曼滤波算法,准确解算出X轴和Y轴的倾角。姿态测量精度0.01度。
4、根据X轴和Y轴的实际倾角,实时调整X轴和Y轴的位置。终控制两轴的姿态平衡。
5、Z轴上的升降部分,由于传感器成本问题无法完成,需要手动进行。如果成本问题可以解决,可以实现自动。可采用的测距方案有:1.气压高度计,利用海拔越高,气压越低的原理。精度很低2. 超声波测距仪,通过发射器发出超声波,被物体反射后,到达接收器的时间差,根据时间差计算距离。比较精确,便宜。3. 雷达测距仪,原理与超声波测距仪类似,同样靠发射来测距,只不过超声波换成了电磁波。比较精确,较贵。
嵌入式系统(运动控制单元)原理:
此嵌入式系统为运动控制单元(步进电机控制器),通常是指在复杂条件下,将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度控制、转矩或力的控制。(此嵌入式部分为外协处理,告知对方原理,对方编写的一套同步控制软件内嵌与其中)
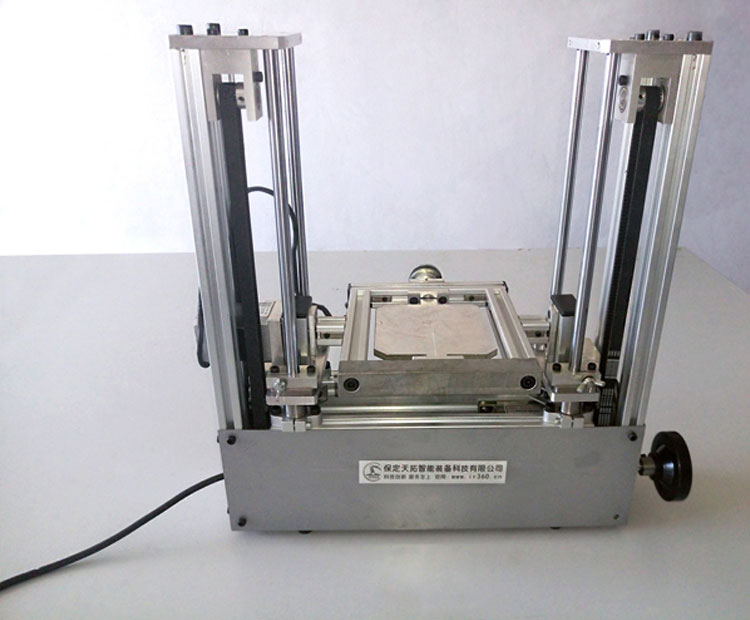
二、三维机械平台
1.步进电机

步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
工作原理
当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
2.步进电机驱动器(此设备选择为微控宝系列步进电机驱动器,体积小,重量轻)

步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。
3.同步带

同步带是以钢丝绳或玻璃纤维为强力层,外覆以聚氨酯或氯丁橡胶的环形带,带的内周制成齿状,使其与齿形带轮啮合。同步带传动时,传动比准确,对轴作用力小,结构紧凑,耐油,抗老化性能好,一般使用温度-20℃―80℃,v<50m>
4.同步轮

同步轮传动是由一条内周表面设有等间距齿的环形皮带和具有相应齿的带轮所组成,运行时,带齿与带轮的齿槽相啮合传递运动和动力,它是综合了皮带传动、链传动齿轮传动各自优点的新型带传动。
5.电机支架

步进电机连接架,市面上有成型的标准产品,方便电机与架体(主体)相连接
6.机械平台(20型材及角件组成)
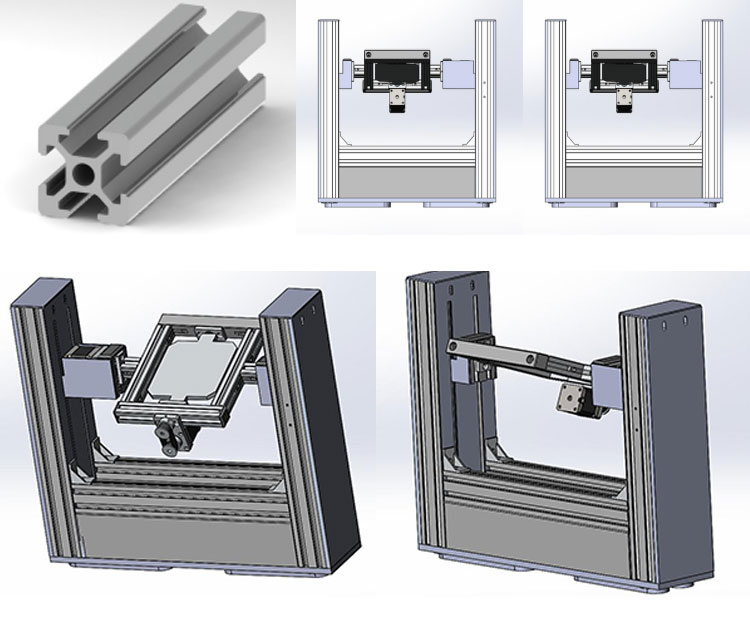
以铝型材20系列为主,通过角连接件连接,按照需求切割成一定角度后拼装成需要的结构,优点是结实、轻巧、易组装、经济
7.配重
任何可以方便安装的重物,完全为解决结构偏心而增加,减少电机转动时力量的分配问题


 首页
首页 电话
电话 产品
产品